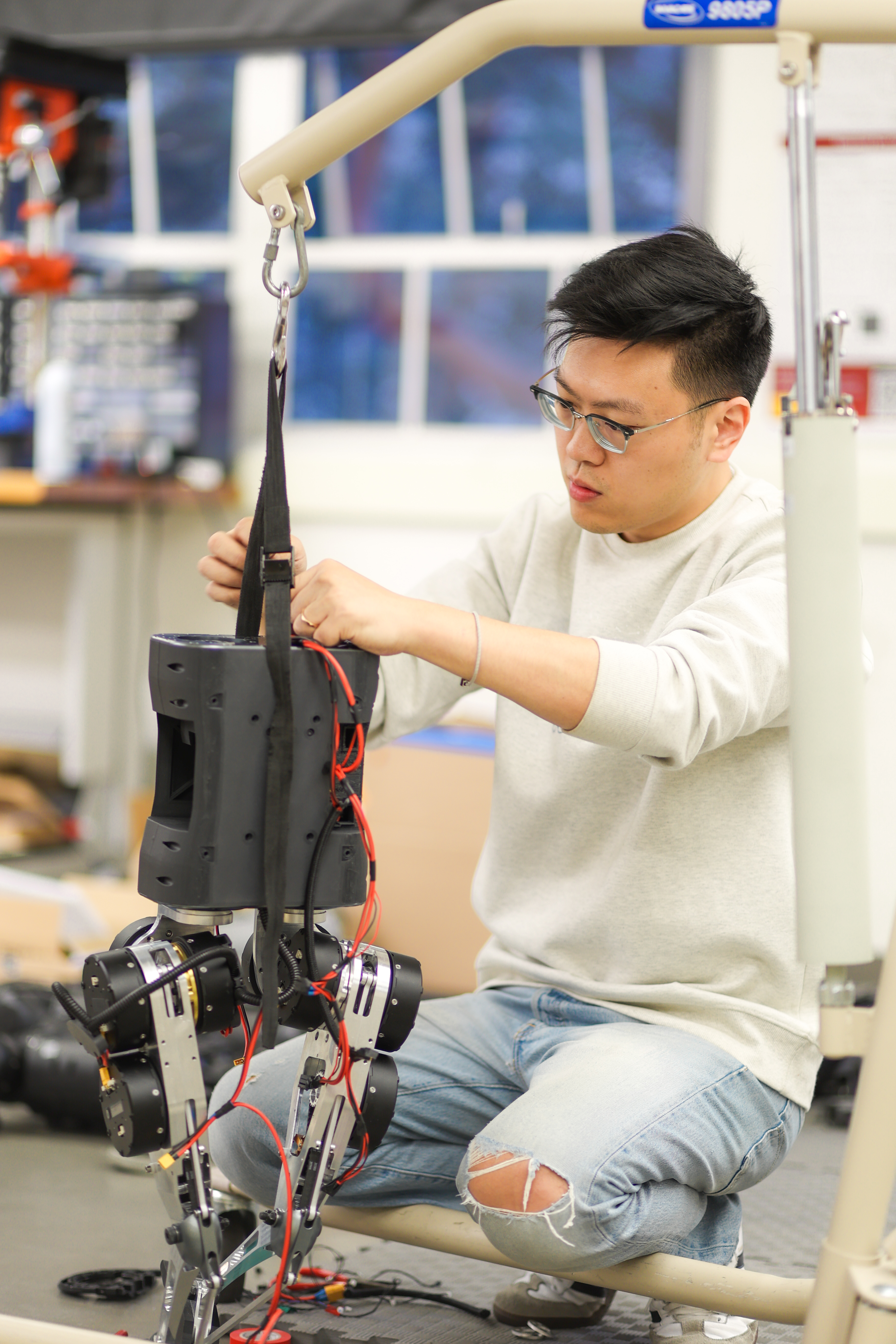
Introducing HECTOR Mini - A 3-D printed cost-friendly bipedal humanoid robot
Published:
Some background and motivations for this work
It is always a pleasure to work on some hardware aspect of robotics. Throughout my PhD, I had the chance to learn (from my labmates) and work on many aspects of the hardware and systems of legged/humanoid robots. We have learned a lot from creating and building the HECTOR v1 and v2 platforms. Towards the end of my PhD, I wanted to give my last shot at designing and creating a new humanoid robot, with something new, and hopefully give some new(old?) perspectives on humanoid robotics to the community.