Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
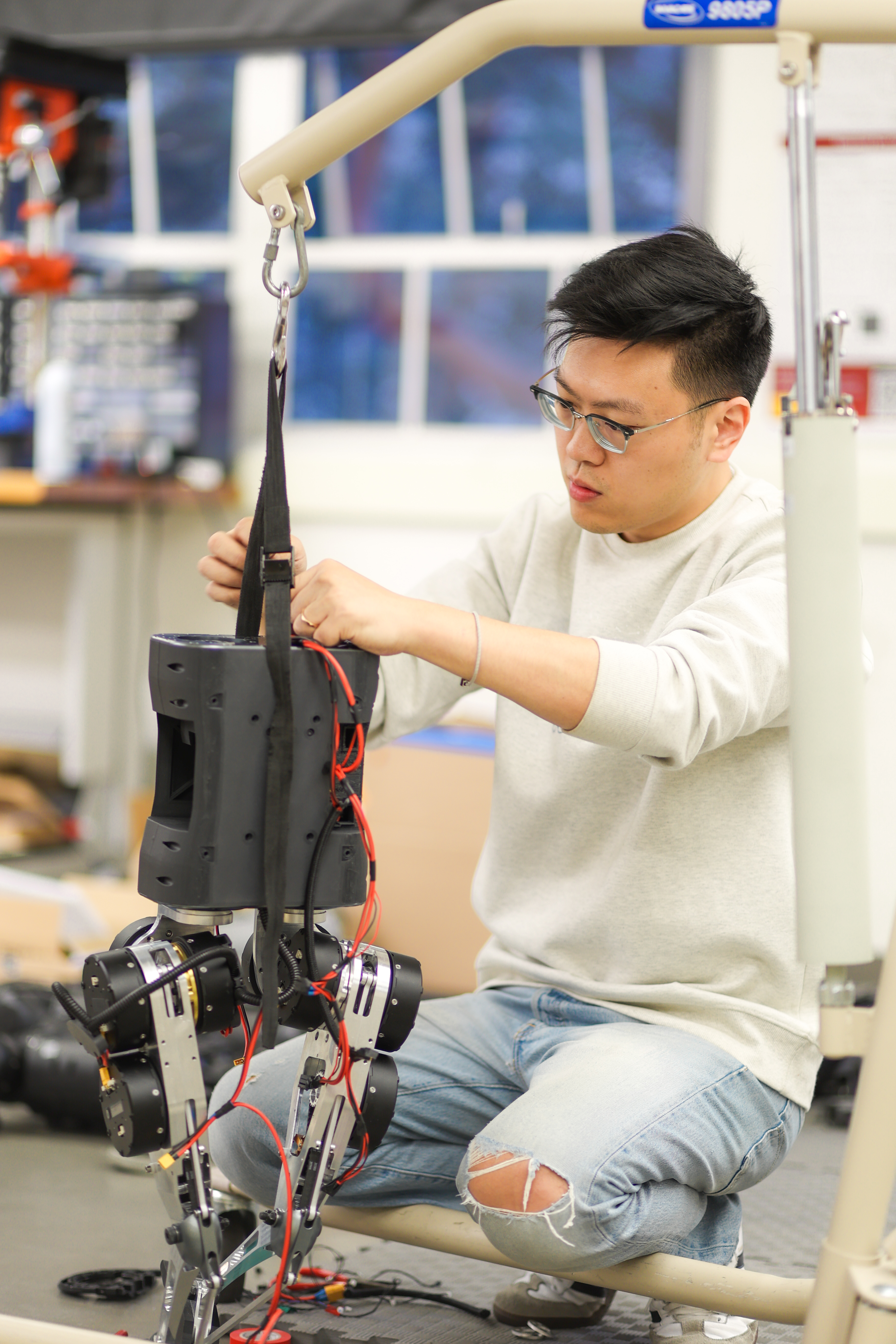
Introducing HECTOR Mini - A 3-D printed cost-friendly bipedal humanoid robot
Published:
Some background and motivations for this work
It is always a pleasure to work on some hardware aspect of robotics. Throughout my PhD, I had the chance to learn (from my labmates) and work on many aspects of the hardware and systems of legged/humanoid robots. We have learned a lot from creating and building the HECTOR v1 and v2 platforms. Towards the end of my PhD, I wanted to give my last shot at designing and creating a new humanoid robot, with something new, and hopefully give some new(old?) perspectives on humanoid robotics to the community.
portfolio
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
publications
Force-and-moment-based Model Predictive Control for Achieving Highly Dynamic Locomotion on Bipedal Robots
Published in IEEE Conference on Decision and Control (CDC) 2021, 2021
Authors: Junheng Li and Quan Nguyen
Balancing Control and Pose Optimization for Wheel-legged Robots Navigating High Obstacles
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022, 2022
Authors: Junheng Li, Junchao Ma, and Quan Nguyen
Dynamic Walking of Bipedal Robots on Uneven Stepping Stones via Adaptive-frequency MPC
Published in IEEE Control Systems Letters (L-CSS) and American Control Conference 2023, 2023
Authors: Junheng Li and Quan Nguyen
Multi-contact MPC for Dynamic Loco-manipulation on Humanoid Robots
Published in American Control Conference (ACC) 2023, 2023
Authors: Junheng Li and Quan Nguyen
Kinodynamics-based Pose Optimization for Humanoid Loco-manipulation
Published in IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS) 2023, 2023
Authors: Junheng Li and Quan Nguyen
Dynamic Loco-manipulation on HECTOR: Humanoid for Enhanced ConTrol and Open-source Research
Published in arXiv.org, 2023
Authors: Junheng Li, Junchao Ma, Omar Kolt, Manas Shah, and Quan Nguyen
Continuous Dynamic Bipedal Jumping via Adaptive-Model Optimization
Published in arXiv.org, 2024
Authors: Junheng Li, Omar Kolt, and Quan Nguyen
talks
Toward Dynamic Locomotion and Loco-manipulation on Humanoid Robots via Model Predictive Control
Published: