About Me
Hi, my name is Junheng Li, I am a Postdoctoral Research Associate at Caltech AMBER Lab, supervised by Professor Aaron Ames. I received PhD in Mechanical Engineering from the University of Southern California in 2025, where I work with Professor Quan Nguyen at the Dynamic Robotics and Control Laboratory. My research focuses on the intersection of hierarchical optimization, learning-based control, and mechatronics of humanoid robots to achieve dynamic locomotion and manipulation (loco-manipulation) behaviors.
Professional
![]() Postdoc, Dept of Mechanical and Civil Engineering, Caltech, 2025 - present
Postdoc, Dept of Mechanical and Civil Engineering, Caltech, 2025 - present
Education
![]() Ph.D. in Mechanical Engineering, University of Southern California, 2022 - 2025
Ph.D. in Mechanical Engineering, University of Southern California, 2022 - 2025
![]() M.S. in Mechanical Engineering, University of Southern California, 2020 - 2021
M.S. in Mechanical Engineering, University of Southern California, 2020 - 2021
![]() B.S. in Mechanical Engineering, Loyola Marymount University, 2016 - 2020
B.S. in Mechanical Engineering, Loyola Marymount University, 2016 - 2020
Publications and Projects
Li, J., Yang, L., Ames, A. D. (2026).
Project website
Dai, M., Compton, W. D., Li, J., Yang, L., Ames, A. D. (2026).
Project website
Krishna, L., Cheng, S., Li, J., Hovakimyan, N., Nguyen, Q. (2025).
RA-L 2025.
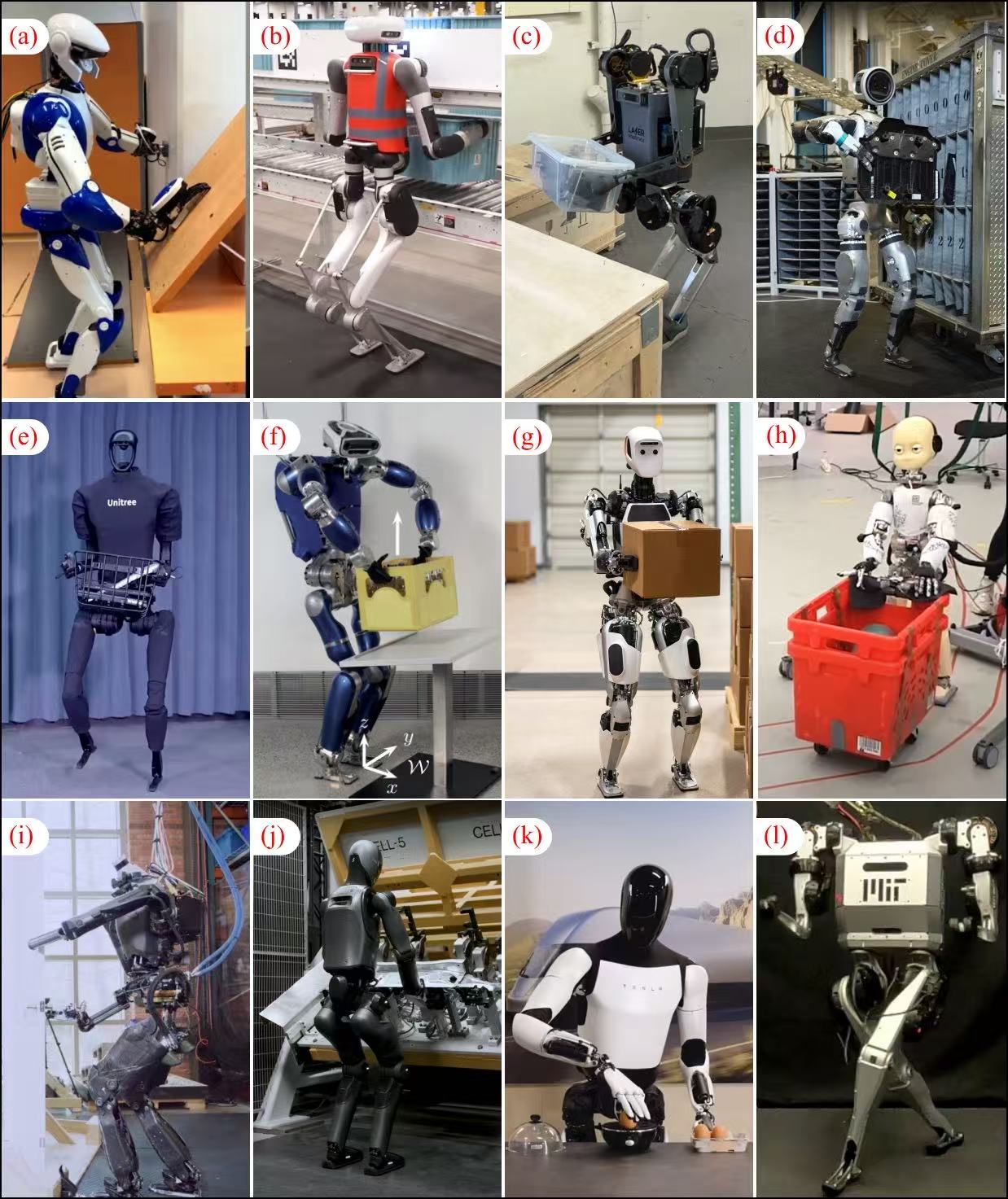
Gu, Z., Li, J., Shen, W., Yu, W., Xie, Z., McCrory, S., Cheng, X., Shamsah, A., Griffin, R., Liu, C. K., Kheddar, A., Peng, X. B., Zhu, Y., Shi, G., Nguyen, Q., Cheng, G., Gao, H., Zhao, Y. (2025).
IEEE/ASME Transactions on Mechatronics.
Li, J., Duan, Z., Ma, J., Nguyen, Q. (2025).
Robotics: Science and Systems 2025.
Li, J., Le, Z., Ma, J., Nguyen, Q. (2025).
ICRA 2025.
Chi, A. C., Li, J., Park, J., Kolt, O., Beiter, B., Leonessa, A., Nguyen, Q., Akbari Hamed, K. (2025).
ICRA 2025.
Chen, Q., Li, J., Cheng, S., Hovakimyan, N., Nguyen, Q. (2024).
IROS 2025.
Li, J., Kolt, O., Nguyen, Q. (2024).
arXiv preprint arXiv:2404.11807.
Li, J., Ma, J., Kolt, O., Shah, M., Nguyen, Q. (2023).
arXiv preprint arXiv:2312.11868.
Li, J., Nguyen, Q. (2023).
2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids).
Li, J., Nguyen, Q. (2023).
2023 IEEE American Control Conference (ACC).
Li, J., Nguyen, Q. (2023).
IEEE Control Systems Letters.
Li, J., Nguyen, Q. (2022).
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Li, J., Nguyen, Q. (2021).
2021 60th IEEE Conference on Decision and Control (CDC).